Remote Controlled Stabilising Camera
The project was to design and implement a platform which could stabilise itself in the pitch and the yaw axes, and allow the user to control the aiming point of the platform.
Project Leader: Mr. Robert Green (Ruetech Dynamic Control)
Project Details / Background
The system is required to stabilise itself when undergoing any changes in the pitch and the yaw planes. When the user inputs a turning rate for the device, the device must respond within 100 milliseconds and begin to move. A joystick is used to provide turning rate commands to the platform. When undergoing movement, the device should have full 360° turning capabilities in the yaw axis. Finally, the device should output the video feed from the camera.
The system uses two control systems. A positional PID controller is used for the device to maintain aim when it is in a stabilising state. A speed PID controller is used when the user inputs a desired turning rate for the device to achieve. The platform switches between the two controllers. The stabilising controller is only on when the user provides no input. The platform transfer function was calculated and used to design a PID controller in MATLAB. The originally calculated values were used to further fine-tune the response of the controller, compensating for variables that cannot easily be quantified, such as friction. Using the PID gain values from the rate controller as initial values, the PID gains for the position controller were then also fine-tuned for a suitable response.
360° of movement was achieved using a slip ring in the base of the platform, making it the pivoting point of the platform. This resulted in the motor using a gear to rotate the platform around the pivot shaft. Finally, due to this slipring implementation, digital video could not be used. A block camera with analogue video output was used, and the 2 wires for the signal and ground was passed through the slipring.
Image Gallery
 Platform used to demonstrate and test device
Platform used to demonstrate and test device
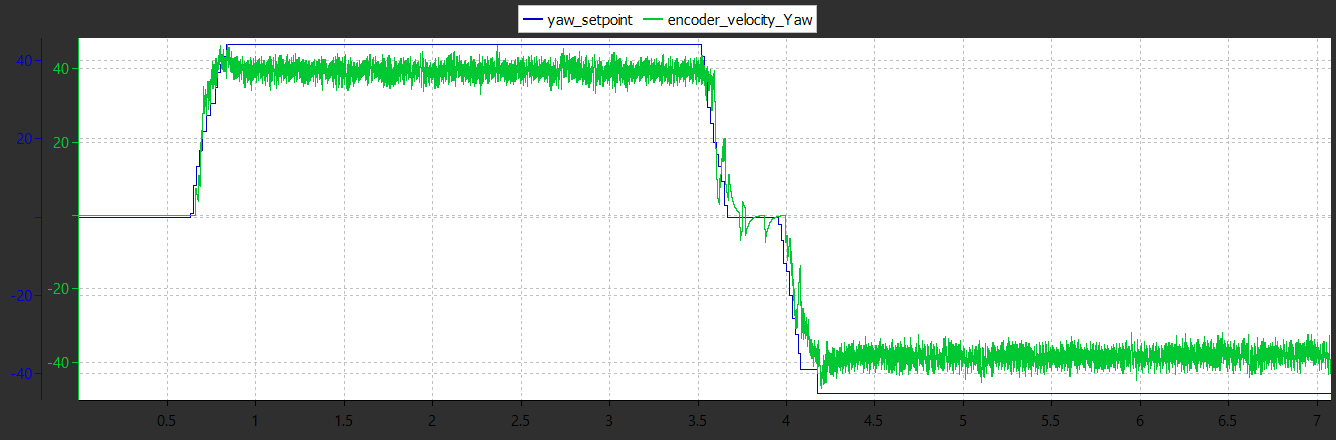 Response of PID when setpoint is changed.
Response of PID when setpoint is changed.
 Video feed displayed from the block camera
Video feed displayed from the block camera
 Using the joystick to adjust the zoom level of the camera
Using the joystick to adjust the zoom level of the camera